
国庆黄金周即将到来,旅行安全至关重要。智能驾驶为旅行带来便利,但也伴随着风险。面对国庆假期复杂的交通,只有通过考试才能最安全。
为了真正验证和分析智能辅助驾驶功能的安全性,国家智能网联汽车长沙试验区于2024年8月26日进行了2023年版的智能汽车信心(C-IAC)研究测试。在真实车辆上测试了奇瑞智能S7智能驾驶系统在雨、雾、强光、灰尘等场景下的性能,并记录了测试结果,以分析车辆的智能驾驶功能水平。
C-IAC是中国国家智能网联汽车(长沙)试验区于2023年推出的首个基于特殊天气和危险场景的智能驾驶评估系统。其目的是为危险场景中的车辆提供可靠的评估结果,帮助消费者识别智能驾驶车辆在实际使用场景中的功能水平。该系统已在20多种流行车型上进行了测试,得到了消费者的高度认可,为消费者合理识别车辆的智能联网功能提供了真实的评价参考。

试验研究报告

测试研究总结
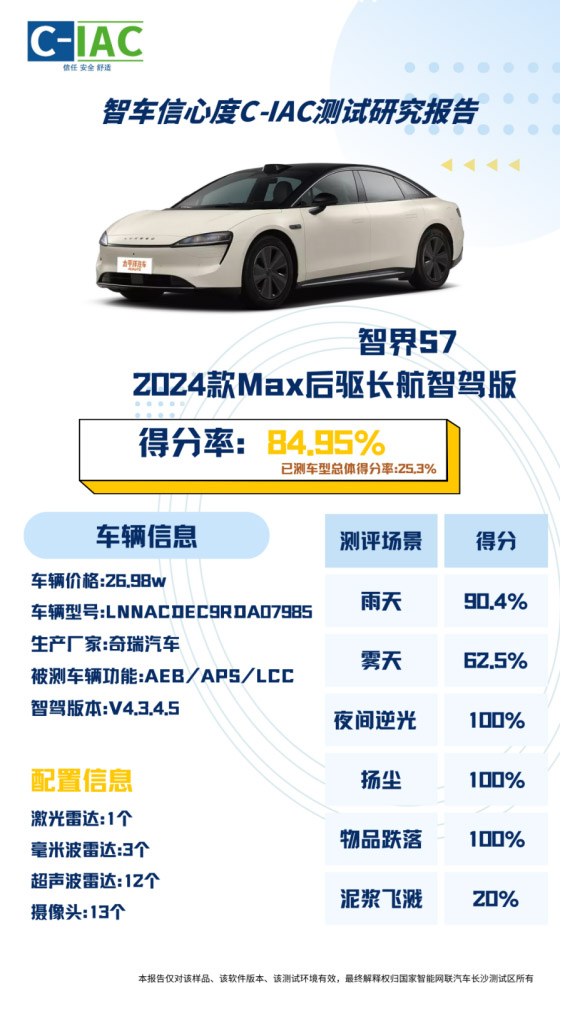
在对智捷S7的智能汽车信心进行C-IAC评估后,发现该车在灰尘、夜间背光和落物下的AEB功能表现良好,获得满分。它在雨天表现良好,得分率超过80%。安装在车内的感知系统可以准确识别纵向和横向行人、静止车辆以及前方其他目标物体,并可以有效地办理智能驾驶紧急制动功能。
在雾天,直捷S7对目标物体的识别受到很大影响,难以准确识别前方目标物体,并提供警告和防撞。进入雾场景后,激光雷达指示污染或障碍物。可能的原因是雾天环境超过了智能驾驶系统的ODD范围,导致AEB功能出现故障。因此,国家智能网联检测区再次提醒消费者在启用智能驾驶功能时,要时刻关注车辆状况和路况,谨防突发事件,实现“万道安全第一”的目标。
试验研究结果的详细说明
雨天场景
该场景测试了车辆在雨天环境中的智能驾驶功能(如AEB)的可靠性。
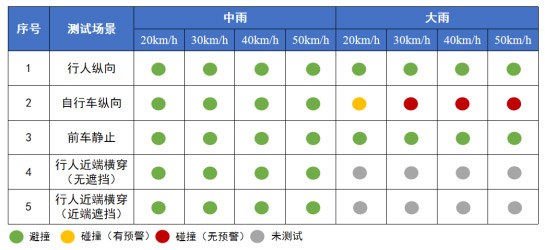
在中雨测试场景中,智捷S7的自动紧急制动系统AEB可以有效避免以低于50km/h的速度与行人、自行车和静止车辆碰撞。
在大雨情况下,智捷S7的自动紧急制动系统AEB无法避免以20km/h的速度与自行车碰撞。在碰撞前4.3秒,它在距离目标物体24.1米处开始发出警告并接管。根据科学统计,驾驶员感知和反应前方道路的时间根据路况的复杂性从0.5秒到4秒不等,通常为2.5秒。GB/T 33577-2017《智能交通系统车辆前方碰撞预警性能要求和测试程序》要求预警时间大于或等于0.8秒。
雾场景
该场景测试了车辆在雾天环境中的智能驾驶功能(如AEB)的可靠性。
在浓雾场景中,智捷S7的自动紧急制动系统AEB可以避免以低于50km/h的速度与前方静止的车辆相撞;当速度低于40km/h时,可以避开行人。如果以50km/h的速度无法避开行人,将在碰撞前1.49秒发出警告提示,距离目标物体20.7米;在20公里/小时的速度下,自行车无法避免碰撞,警告提示将接管。
在大雾测试场景中,智捷S7的自动紧急制动系统AEB可以以20和30km/h的速度避开行人和静止车辆,但无法避开障碍自行车。
夜间倒车远光灯场景
该场景测试了车辆在夜间倒车远光灯环境中的智能驾驶功能(如AEB)的可靠性。
在夜间背光场景中,智捷S7的自动紧急制动系统AEB可以避免与前方静止车辆和50km/h的纵向行人发生碰撞。
粉尘现场
该场景测试了车辆在多尘环境中的智能驾驶功能(如AEB)的可靠性。
在尘土飞扬前的静止场景中,智捷S7的自动紧急制动系统AEB可以在速度低于50km/h时避免与前方静止的车辆碰撞。
车辆物体坠落现场
该场景测试了车辆在前方有坠落物体的情况下智能驾驶功能(AEB、ACC等)的可靠性。
在车辆前方有物体坠落的情况下,智捷S7的自动紧急制动系统AEB可以在50km/h以下避免与车辆坠落的纸箱碰撞。减速并避免碰撞后,它绕过纸箱后继续以恒定速度行驶。
溅泥场景
该场景测试了车辆在溅泥环境中的智能驾驶功能(如AEB)的可靠性。
在溅泥前的静止场景中,智捷S7的自动紧急制动系统AEB可以避免以20km/h的速度与前方静止的车辆碰撞。但是,在30km/h的速度下,由于溅泥和污垢,AEB功能无法激活。
雨中自动泊车场景

在垂直停车场景中,智捷S7的APS自动停车系统可以在所有场景中停车并留在停车位。
在平行停车场景中,智捷S7的APS自动停车系统可以在所有场景中停车并留在停车位。
在倾斜停车位场景中,智捷S7的APS自动停车系统可以在所有场景中停车并留在停车位。
















